
◎ 科技日报记者 刘艳
2月18日下午冰壶运动员徐晓明,男子冰壶铜牌赛开始前,等待已久的六足冰壶机器人“选手”为奥运选手热身赛场。科技能力的展示方式为北京冬奥会带来了新的热点。
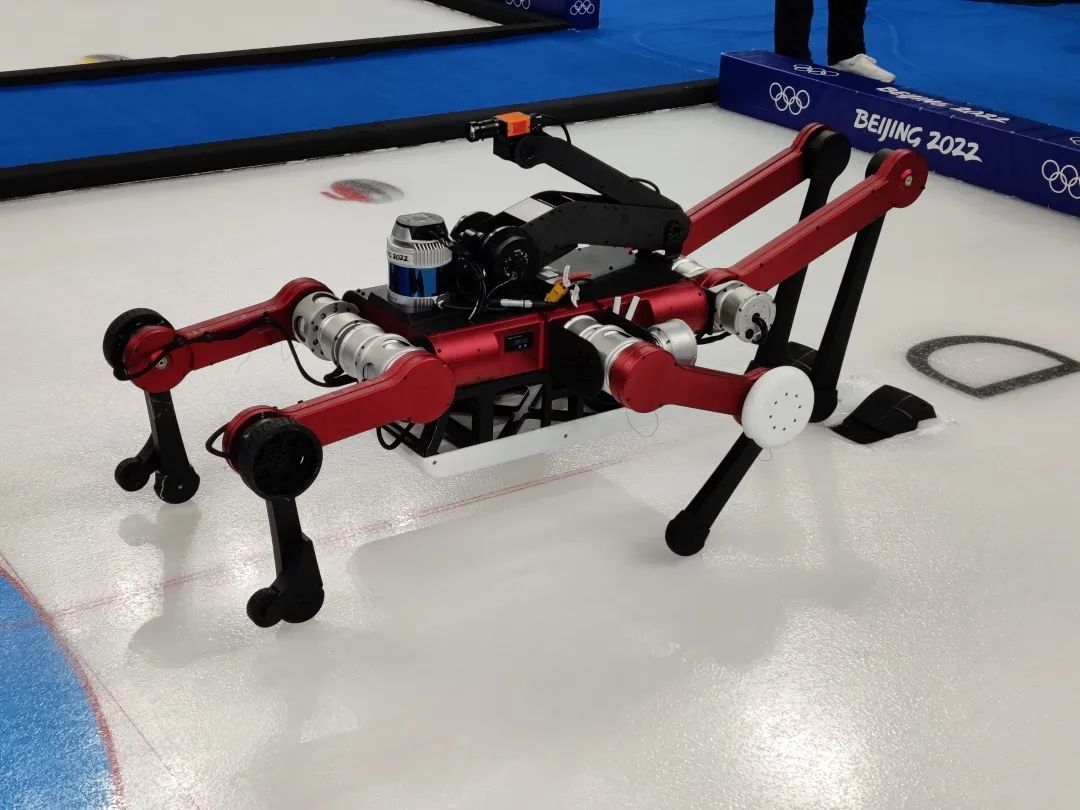
这位身穿红衫的冰壶“选手”是世界上第一个模仿人类踩踏、支撑滑动、旋转冰壶等动作的六足冰壶机器人。
上海交通大学机械与动力工程学院高峰教授牵头的“科技冬奥会”重点项目“冬奥会六足机器人的研发及典型示范应用”高校与上海智能制造功能平台有限公司组成的六足冰壶机器人研究团队将研发成果送至冬奥会冰场。
在上海的测试中,机器人寻找跳投来从站立切换到投球。
高科技冰雪场地训练
虽然对六足冰壶机器人的表现很有信心,但直到热身赛结束,高风教授的心才放下。
冰壶比赛中,投掷队蹲在冰面上滑行,轻轻转动冰壶箱,控制击球方向。两名队友用冰刷刷过冰面,然后进行冰壶运动,控制方向和速度。
六足机器人要完成这组动作并不容易。

在上海测试期间,机器人向大本营扔了一个锅。
“一个人投冰壶时,一条腿支撑身体,另一条腿蹬发令器,眼睛瞄准目标,手控制冰壶的速度和方向,这是一种复杂的决策行为。” 高峰教授告诉科技日报记者。“根据人们投掷冰壶的行为特征设计机器人的结构;根据视觉和力觉测得的信息识别冰面与机器人接触的动态参数,从而预测出冰面的运动轨迹。机器人的滑动和卷曲;根据人类投掷卷曲的决策方法来控制机器人的行为等,是我们在开发六足卷曲机器人时遇到的技术挑战。”
克服各种挑战,高高教授带领团队让世界见证了六足机器人在冰壶赛场上的实力。

在卷壶过程中,六足机器人的前腿转化为人手的功能,实现了握水壶和旋转水壶的动作。中腿的膝盖和前腿的肘部结合成四点接触冰面,形成支撑腿的功能。后腿踩在步进器上,实现推动机器人加速和滑动的功能。此外,前腿在机器人滑动运动过程中具有二次投掷,以控制弯举运动的方向、速度和角速度,从而实现精准投掷和击球功能。

六足冰壶机器人用水壶滑行。
从单腿跳跃发展到四足“转箱爬楼梯”,波士顿动力“大狗”加速了全球足部机器人的发展。
“波士顿动力是行业中的佼佼者,引领着有脚机器人的发展。” 高峰教授说,“在特种机器人中,‘长腿’机器人是最难研发的。四足机器人是美国最好的,六足机器人是最好的。我们尽力而为。”
后冬奥时代“人机融合”前景看好
这不是冰壶机器人的首次亮相。
高峰教授介绍,2018年平昌冬奥会后,世界上出现了以轮子驱动为主的轮式冰壶机器人,但无法完全模仿人类的冰壶行为,对赛事科学训练的帮助有限。六足冰壶机器人的出现弥补了这些不足。
高峰教授透露,获得“科技冬奥会”重点专项支持的不仅仅是冰壶机器人,他们还为北京冬奥会带来了12个六足机器人的5款机型。这包括被外媒盛赞的“不可思议的中国滑雪机器人”。

高峰教授(右 四) 和他的团队。
高峰教授表示,机器人智能属于行为智能,体现在肢体与智能的结合上。机器人了解环境并了解如何执行任务,但很难相应地表达行为。因此,实现行为智能是一个非常复杂的问题。
据了解,在“科技冬奥会”的专项助力下,高教授团队在六足机器人性能控制、感知规划等关键算法设计上取得了创新突破。、自主规划等一系列关键核心技术研发,使机器人集人机交互、环境感知、轨迹规划、智能决策和稳定控制于一体。
当全世界都在努力解决有脚机器人产业时,我国机器人大军在北京冬奥会上上演了现实版的“机器人动员”。. 六足机器人破圈,来到冰雪场,为后冬奥时代“人机融合”的新局面带来无限想象。
高峰教授说:“相信在不久的将来,冬奥会展示的科技成果将逐步走进寻常百姓家。我们也将加快研究步伐冰壶运动员徐晓明,努力实现有腿运动的广泛应用。”尽快机器人。”